Weekly Reports
Week 1:
Project: We will be designing a smart walker for our client (Dr. Frank Yin). The walker will focus primarily on safety and ease of use during ambulation. Some general requirements that we have been given can be seen below:
- Device must be able to automatically detect when maximum stability is required and accordingly set its brakes. In other words, it should not be able to be suddenly pushed forward or backward if the user is not in an upright ambulatory position.
- Device should be able to sense when safe and easy ambulation is needed and alter its settings to do so.
- Device should be able to sense gradations of a downward incline and set the brakes to allow a slow pace in order to ensure safety. This feature would be adjustable for different users.
- Device should be portable (meaning the power source will also. have to be portable). It should also have the ability to move over curbs and small steps/bumps.
Week 2:
This week, we had two meetings: a meeting with Anna, Nandita, Eddie, and Athena and a meeting with Anna, Nandita, and Prof. Yin. In our meetings, we determined specific roles for each team member with regards to the different functions of the SmartWalker. We also spoke with our client to determine some of the SmartWalker specifications. We are currently setting up a meeting with our client and the entire team for next week.
Week 3:
This week, our entire team (Anna, Nandita, Eddie, and Athena) met with our client. We clarified the 4 key aims of the SmartWalker and assigned each team member an aim to research. The goal of this literature research is to identify specific ways to address each of the broader aims. For example, Nandita is responsible for researching the power sources - so she will research and compile a list of all the potential power sources that we could utilize for this project, along with a description of their pros and cons. All four team members will share their research during a Skype call on Friday night (9/29).
We are also in the process of deciding other broader specifications. During our conversation with our client, it was decided that our prototype should weigh no more than 30 lbs and should support a patient weight of up to 250 lbs. These specifications were determined with research on existing walkers. This research on current walkers will be continued, to start formulating a list of the pros and cons of the existing designs. Nandita and Anna are considering the possibility of visiting a medical shop that sells walkers to view the different existing options in person. While we currently have an idea of the rough concept of our design, we believe that seeing and testing the walkers in person will better inform us on what specifications a potential user would most benefit from.
We are also in the process of deciding other broader specifications. During our conversation with our client, it was decided that our prototype should weigh no more than 30 lbs and should support a patient weight of up to 250 lbs. These specifications were determined with research on existing walkers. This research on current walkers will be continued, to start formulating a list of the pros and cons of the existing designs. Nandita and Anna are considering the possibility of visiting a medical shop that sells walkers to view the different existing options in person. While we currently have an idea of the rough concept of our design, we believe that seeing and testing the walkers in person will better inform us on what specifications a potential user would most benefit from.
Week 4:
This week, Anna, Nandita, Eddie, and Athena met over Skype to discuss research that each had conducted on existing SmartWalker solutions. In particular, the team discussed specific types of sensors as potential components of the SmartWalker. Based on preliminary research, it appears that the end product will incorporate some combination of the aforementioned sensors. In this way, the walker would not only detect an acceleration, but would be able to distinguish between wanted and unwanted accelerations (i.e. if the user falls forward suddenly). Anna, Nandita, Eddie, and Athena also discussed the need for a portable power source and decided on batteries. It was also decided that the walker should include some sort of alert when the battery power runs low. The final decision was to explore the use of Arduino in our prototype, since this is an area that all four team members have some level of comfort and experience with.
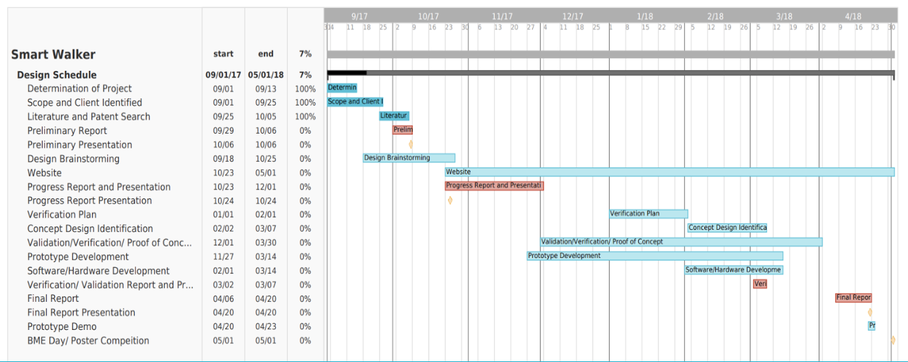
Proposed Design Schedule
SNEAK A PEAK...
Photo Gallery

Coastal Italy
|

African Safari
|

Mayan Trail
|
